Performing detailed machining tasks requires a robot to precisely know the position of the workpiece. Using a modified particle filter and leveraging information gain, I was able to choose efficient locations to sense with a touch probe, and store and update the belief of the object’s position.
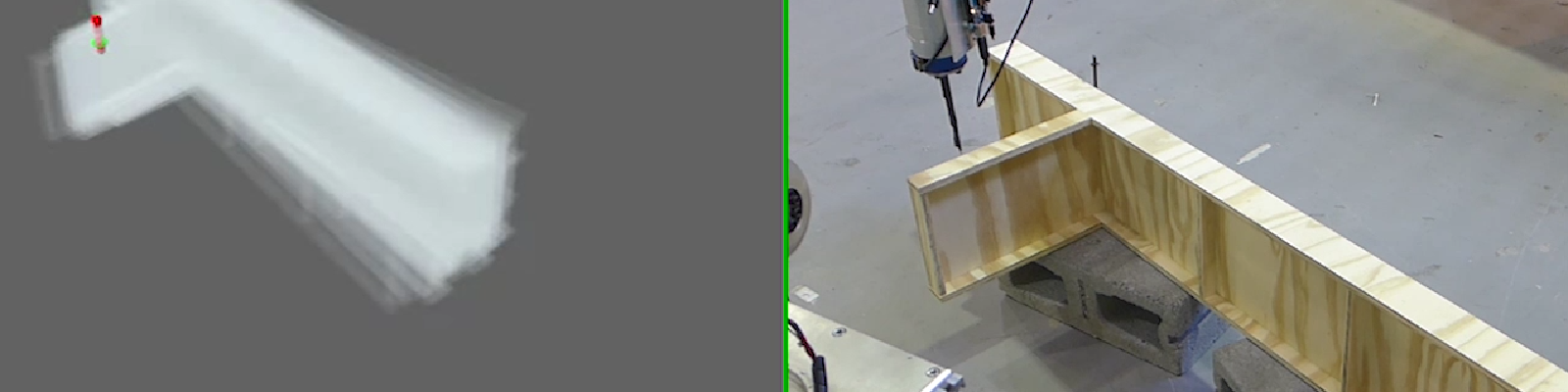
Touch localization
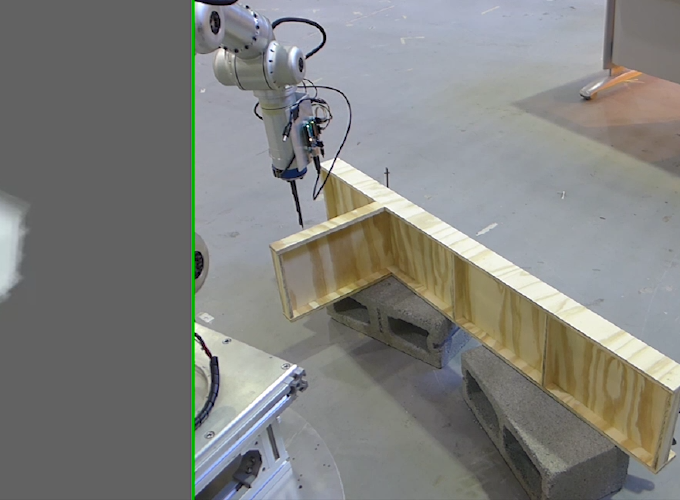
Touch localization
