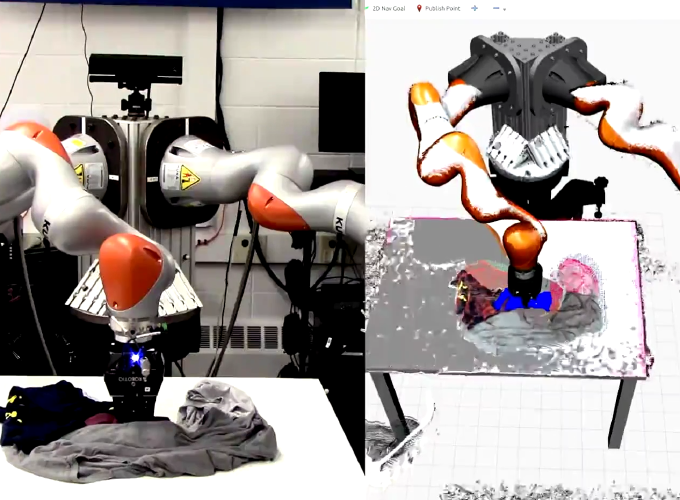
At the University of Michigan in collaboration with my lab I made our robot, Victor, pick through a pile of laundry to find a specific shirt. Computer vision segmented the clothing and if the target shirt was not visible or not reachable an algorithm decided which clothing item to pick. A grasp planner and motion planner moved directed the robot arm to grab an item. The pick was verified by computer vision and non-target objects were discarded until the target was found.
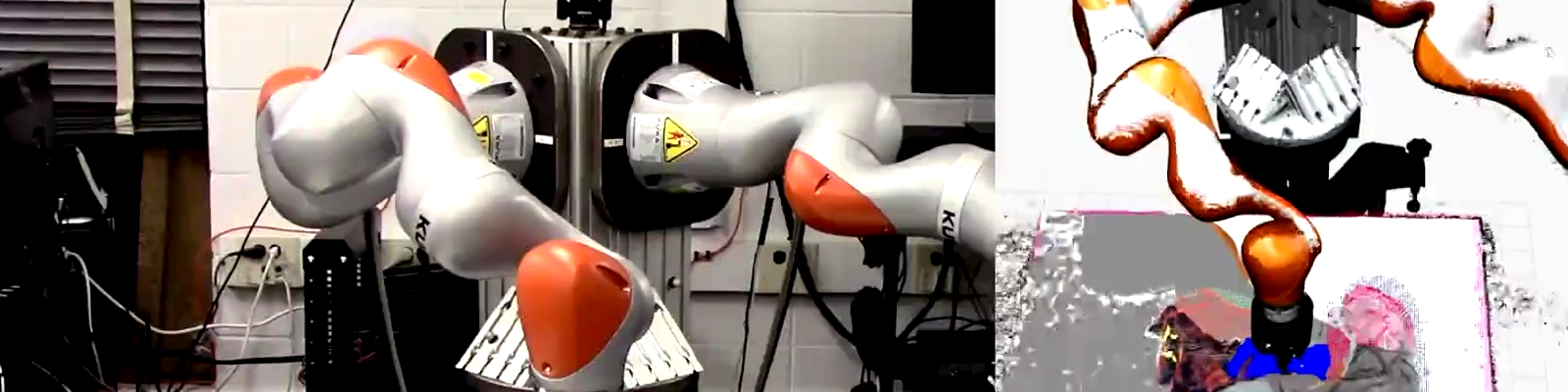
Computer vision aided laundry sorting
Computer vision aided laundry sorting
